Generative Modeling by Estimating Gradients of the Data Distribution
This blog post focuses on a promising new direction for generative modeling. We can learn score functions (gradients of log probability density functions) on a large number of noise-perturbed data distributions, then generate samples with Langevin-type sampling. The resulting generative models, often called score-based generative models, has several important advantages over existing model families: GAN-level sample quality without adversarial training, flexible model architectures, exact log-likelihood computation, and inverse problem solving without re-training models. In this blog post, we will show you in more detail the intuition, basic concepts, and potential applications of score-based generative models.
Introduction
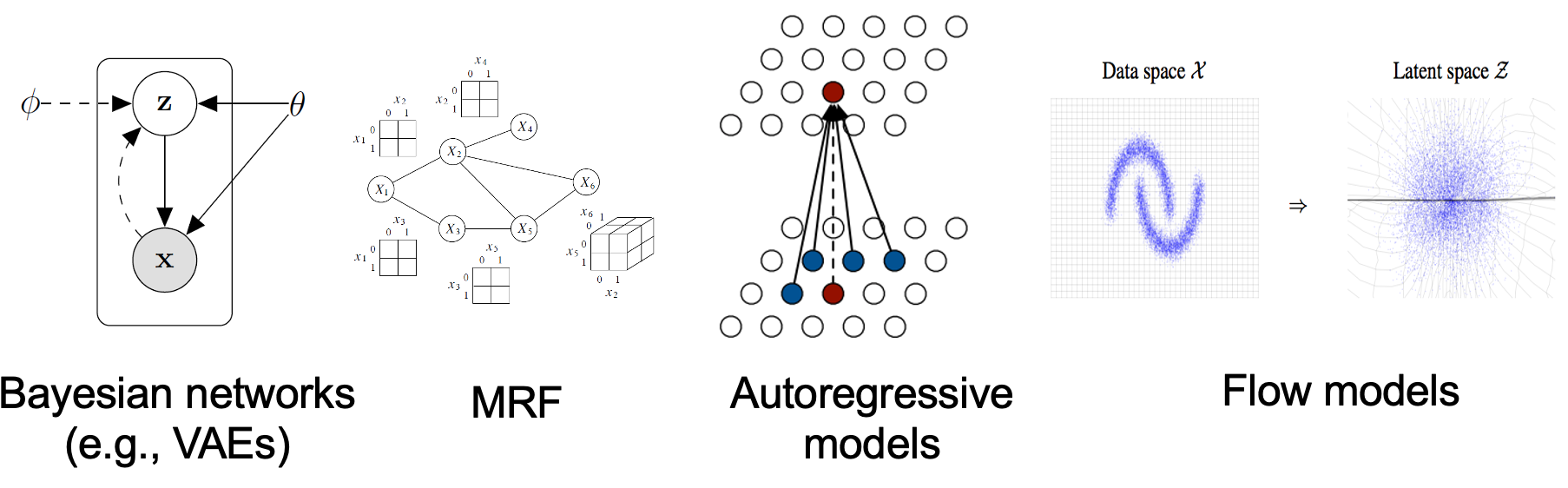
Existing generative modeling techniques can largely be grouped into two categories based on how they represent probability distributions.
- likelihood-based models, which directly learn the distribution’s probability density (or mass) function via (approximate) maximum likelihood. Typical likelihood-based models include autoregressive models
, normalizing flow models , energy-based models (EBMs) , and variational auto-encoders (VAEs) . - implicit generative models
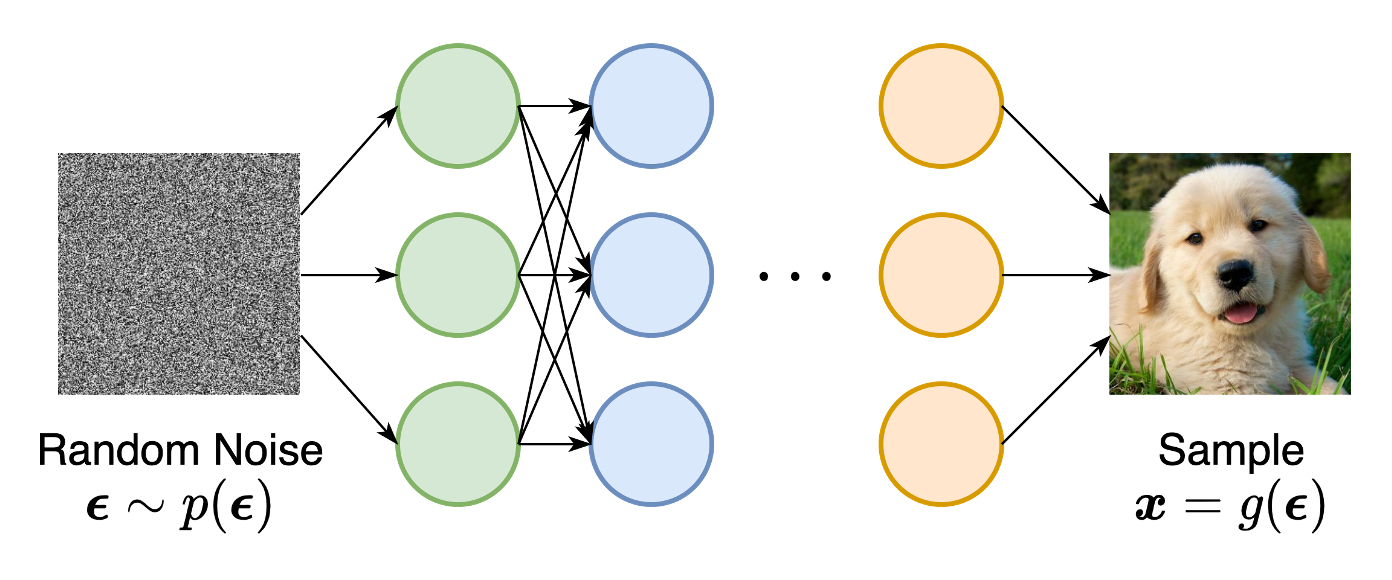
, where the probability distribution is implicitly represented by a model of its sampling process. The most prominent example is generative adversarial networks (GANs) , where new samples from the data distribution are synthesized by transforming a random Gaussian vector with a neural network.
Likelihood-based models and implicit generative models, however, both have significant limitations. Likelihood-based models either require strong restrictions on the model architecture to ensure a tractable normalizing constant for likelihood computation, or must rely on surrogate objectives to approximate maximum likelihood training. Implicit generative models, on the other hand, often require adversarial training, which is notoriously unstable
In this blog post, I will introduce another way to represent probability distributions that may circumvent several of these limitations. The key idea is to model the gradient of the log probability density function, a quantity often known as the (Stein) score function
Score-based models have achieved state-of-the-art performance on many downstream tasks and applications. These tasks include, among others, image generation

This post aims to show you the motivation and intuition of score-based generative modeling, as well as its basic concepts, properties and applications.
The score function, score-based models, and score matching
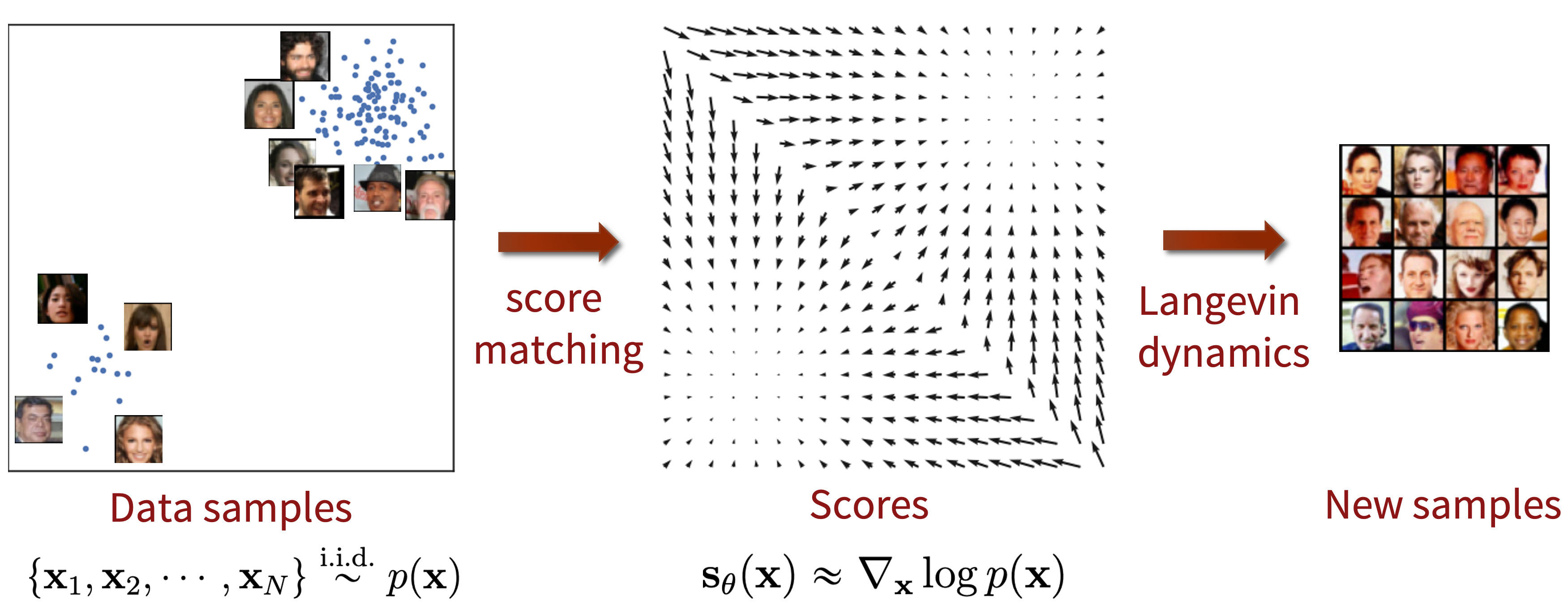
Suppose we are given a dataset \(\{\mathbf{x}_1, \mathbf{x}_2, \cdots, \mathbf{x}_N\}\), where each point is drawn independently from an underlying data distribution \(p(\mathbf{x})\). Given this dataset, the goal of generative modeling is to fit a model to the data distribution such that we can synthesize new data points at will by sampling from the distribution.
In order to build such a generative model, we first need a way to represent a probability distribution. One such way, as in likelihood-based models, is to directly model the probability density function (p.d.f.) or probability mass function (p.m.f.). Let \(f_\theta(\mathbf{x}) \in \mathbb{R}\) be a real-valued function parameterized by a learnable parameter \(\theta\). We can define a p.d.f.
We can train \(p_\theta(\mathbf{x})\) by maximizing the log-likelihood of the data \begin{align} \max_\theta \sum_{i=1}^N \log p_\theta(\mathbf{x}_i). \label{mle} \end{align} However, equation \eqref{mle} requires \(p_\theta(\mathbf{x})\) to be a normalized probability density function. This is undesirable because in order to compute \(p_\theta(\mathbf{x})\), we must evaluate the normalizing constant \(Z_\theta\)—a typically intractable quantity for any general \(f_\theta(\mathbf{x})\). Thus to make maximum likelihood training feasible, likelihood-based models must either restrict their model architectures (e.g., causal convolutions in autoregressive models, invertible networks in normalizing flow models) to make \(Z_\theta\) tractable, or approximate the normalizing constant (e.g., variational inference in VAEs, or MCMC sampling used in contrastive divergence
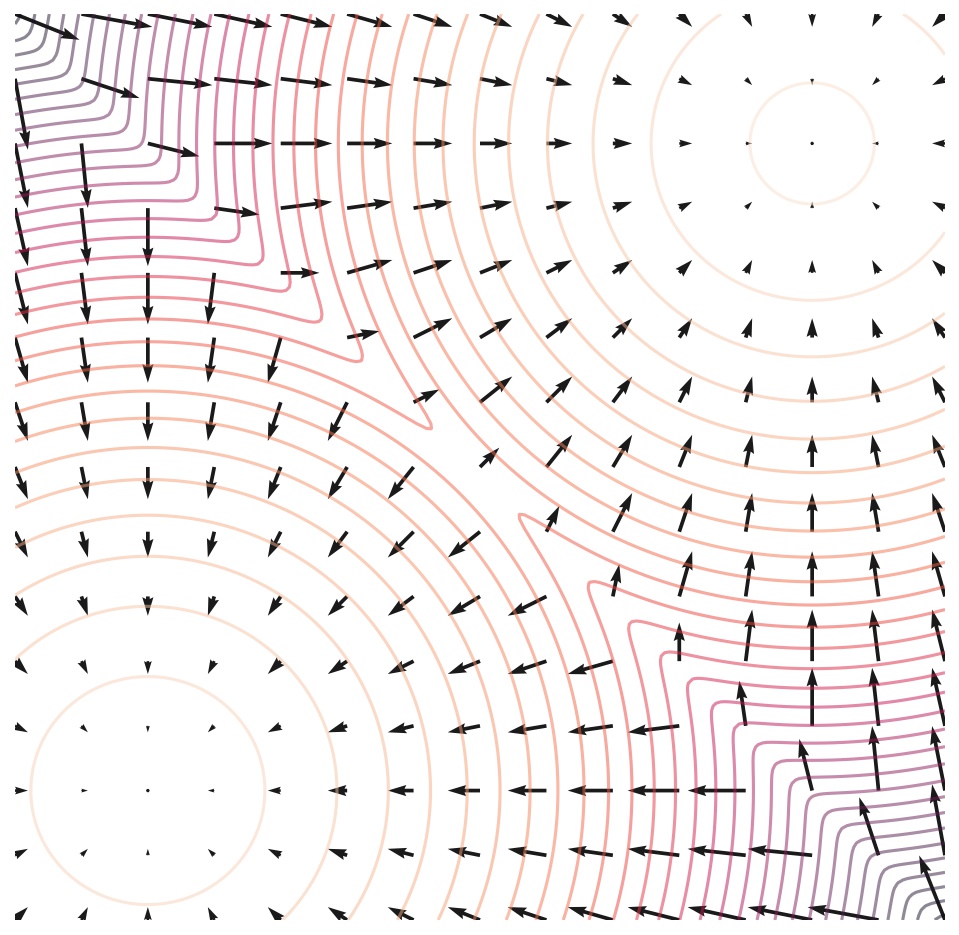
By modeling the score function instead of the density function, we can sidestep the difficulty of intractable normalizing constants. The score function of a distribution \(p(\mathbf{x})\) is defined as \begin{equation} \nabla_\mathbf{x} \log p(\mathbf{x}), \notag \end{equation} and a model for the score function is called a score-based model
Note that the score-based model \(\mathbf{s}_\theta(\mathbf{x})\) is independent of the normalizing constant \(Z_\theta\) ! This significantly expands the family of models that we can tractably use, since we don’t need any special architectures to make the normalizing constant tractable.
Similar to likelihood-based models, we can train score-based models by minimizing the Fisher divergence
Intuitively, the Fisher divergence compares the squared \(\ell_2\) distance between the ground-truth data score and the score-based model. Directly computing this divergence, however, is infeasible because it requires access to the unknown data score \(\nabla_\mathbf{x} \log p(\mathbf{x})\). Fortunately, there exists a family of methods called score matching
Additionally, using the score matching objective gives us a considerable amount of modeling flexibility. The Fisher divergence itself does not require \(\mathbf{s}_\theta(\mathbf{x})\) to be an actual score function of any normalized distribution—it simply compares the \(\ell_2\) distance between the ground-truth data score and the score-based model, with no additional assumptions on the form of \(\mathbf{s}_\theta(\mathbf{x})\). In fact, the only requirement on the score-based model is that it should be a vector-valued function with the same input and output dimensionality, which is easy to satisfy in practice.
As a brief summary, we can represent a distribution by modeling its score function, which can be estimated by training a score-based model of free-form architectures with score matching.
Langevin dynamics
Once we have trained a score-based model \(\mathbf{s}_\theta(\mathbf{x}) \approx \nabla_\mathbf{x} \log p(\mathbf{x})\), we can use an iterative procedure called Langevin dynamics
Langevin dynamics provides an MCMC procedure to sample from a distribution \(p(\mathbf{x})\) using only its score function \(\nabla_\mathbf{x} \log p(\mathbf{x})\). Specifically, it initializes the chain from an arbitrary prior distribution \(\mathbf{x}_0 \sim \pi(\mathbf{x})\), and then iterates the following
\[\begin{align} \mathbf{x}_{i+1} \gets \mathbf{x}_i + \epsilon \nabla_\mathbf{x} \log p(\mathbf{x}) + \sqrt{2\epsilon}~ \mathbf{z}_i, \quad i=0,1,\cdots, K, \label{langevin} \end{align}\]where \(\mathbf{z}_i \sim \mathcal{N}(0, I)\). When \(\epsilon \to 0\) and \(K \to \infty\), \(\mathbf{x}_K\) obtained from the procedure in \eqref{langevin} converges to a sample from \(p(\mathbf{x})\) under some regularity conditions. In practice, the error is negligible when \(\epsilon\) is sufficiently small and \(K\) is sufficiently large.
Note that Langevin dynamics accesses \(p(\mathbf{x})\) only through \(\nabla_\mathbf{x} \log p(\mathbf{x})\). Since \(\mathbf{s}_\theta(\mathbf{x}) \approx \nabla_\mathbf{x} \log p(\mathbf{x})\), we can produce samples from our score-based model \(\mathbf{s}_\theta(\mathbf{x})\) by plugging it into equation \eqref{langevin}.
Naive score-based generative modeling and its pitfalls
So far, we’ve discussed how to train a score-based model with score matching, and then produce samples via Langevin dynamics. However, this naive approach has had limited success in practice—we’ll talk about some pitfalls of score matching that received little attention in prior works
The key challenge is the fact that the estimated score functions are inaccurate in low density regions, where few data points are available for computing the score matching objective. This is expected as score matching minimizes the Fisher divergence
\[\mathbb{E}_{p(\mathbf{x})}[\| \nabla_\mathbf{x} \log p(\mathbf{x}) - \mathbf{s}_\theta(\mathbf{x}) \|_2^2] = \int p(\mathbf{x}) \| \nabla_\mathbf{x} \log p(\mathbf{x}) - \mathbf{s}_\theta(\mathbf{x}) \|_2^2 \mathrm{d}\mathbf{x}.\]Since the \(\ell_2\) differences between the true data score function and score-based model are weighted by \(p(\mathbf{x})\), they are largely ignored in low density regions where \(p(\mathbf{x})\) is small. This behavior can lead to subpar results, as illustrated by the figure below:
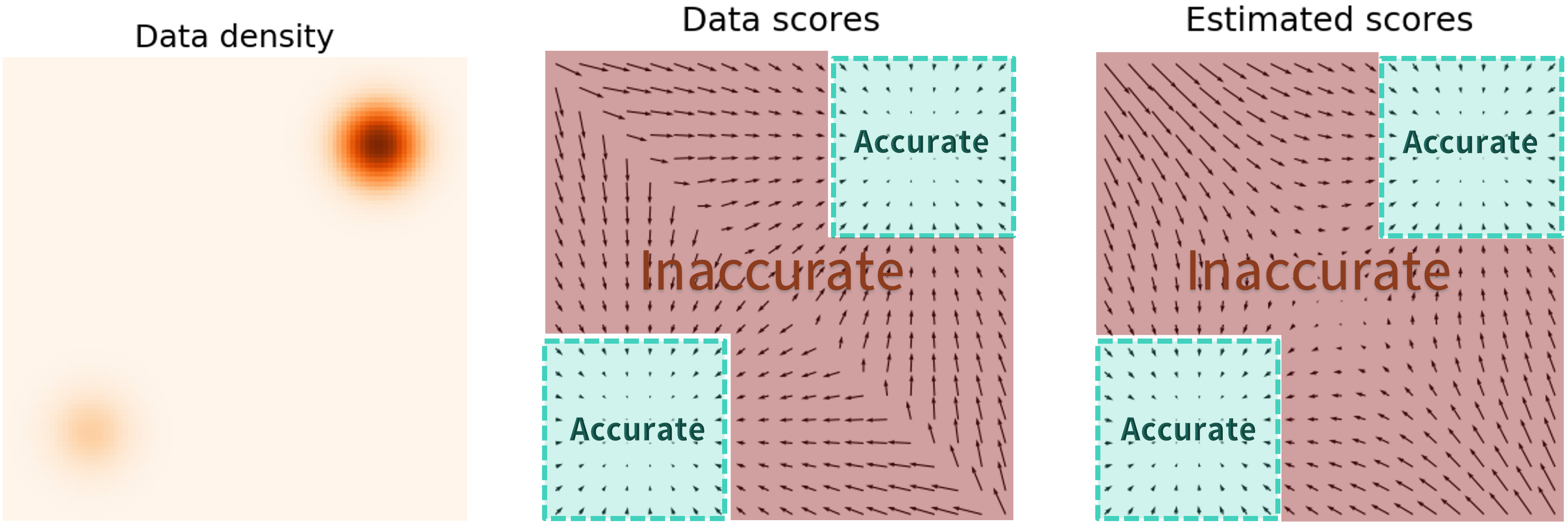
When sampling with Langevin dynamics, our initial sample is highly likely in low density regions when data reside in a high dimensional space. Therefore, having an inaccurate score-based model will derail Langevin dynamics from the very beginning of the procedure, preventing it from generating high quality samples that are representative of the data.
Score-based generative modeling with multiple noise perturbations
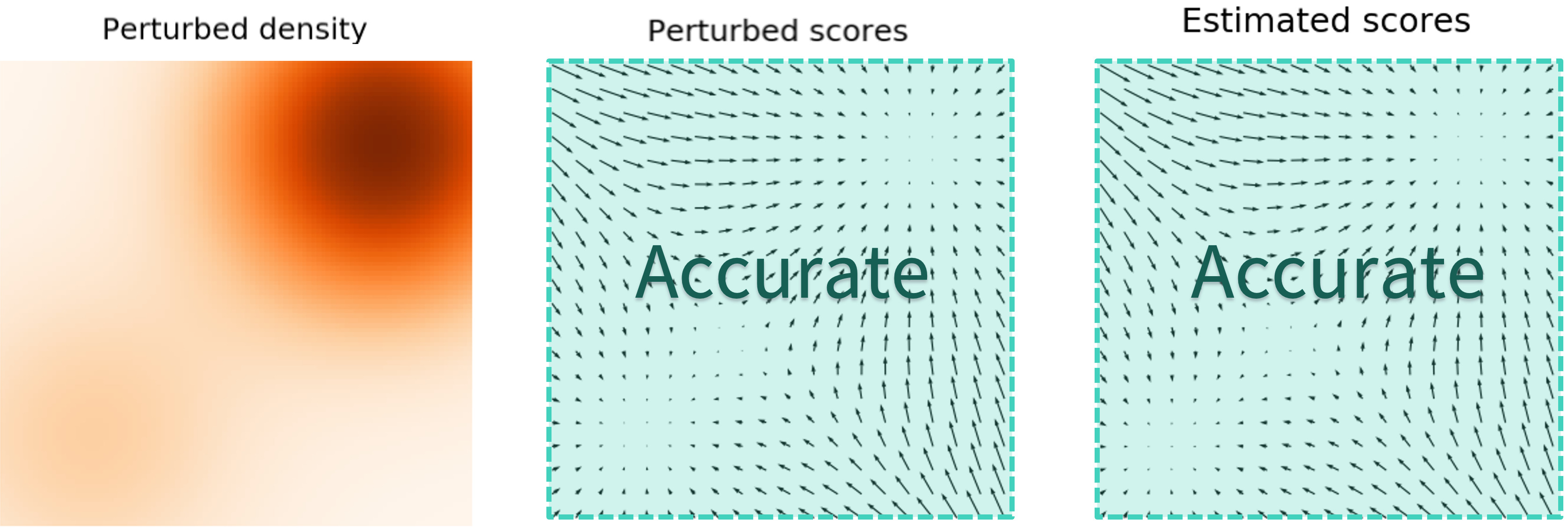
How can we bypass the difficulty of accurate score estimation in regions of low data density? Our solution is to perturb data points with noise and train score-based models on the noisy data points instead. When the noise magnitude is sufficiently large, it can populate low data density regions to improve the accuracy of estimated scores. For example, here is what happens when we perturb a mixture of two Gaussians perturbed by additional Gaussian noise.
Yet another question remains: how do we choose an appropriate noise scale for the perturbation process? Larger noise can obviously cover more low density regions for better score estimation, but it over-corrupts the data and alters it significantly from the original distribution. Smaller noise, on the other hand, causes less corruption of the original data distribution, but does not cover the low density regions as well as we would like.
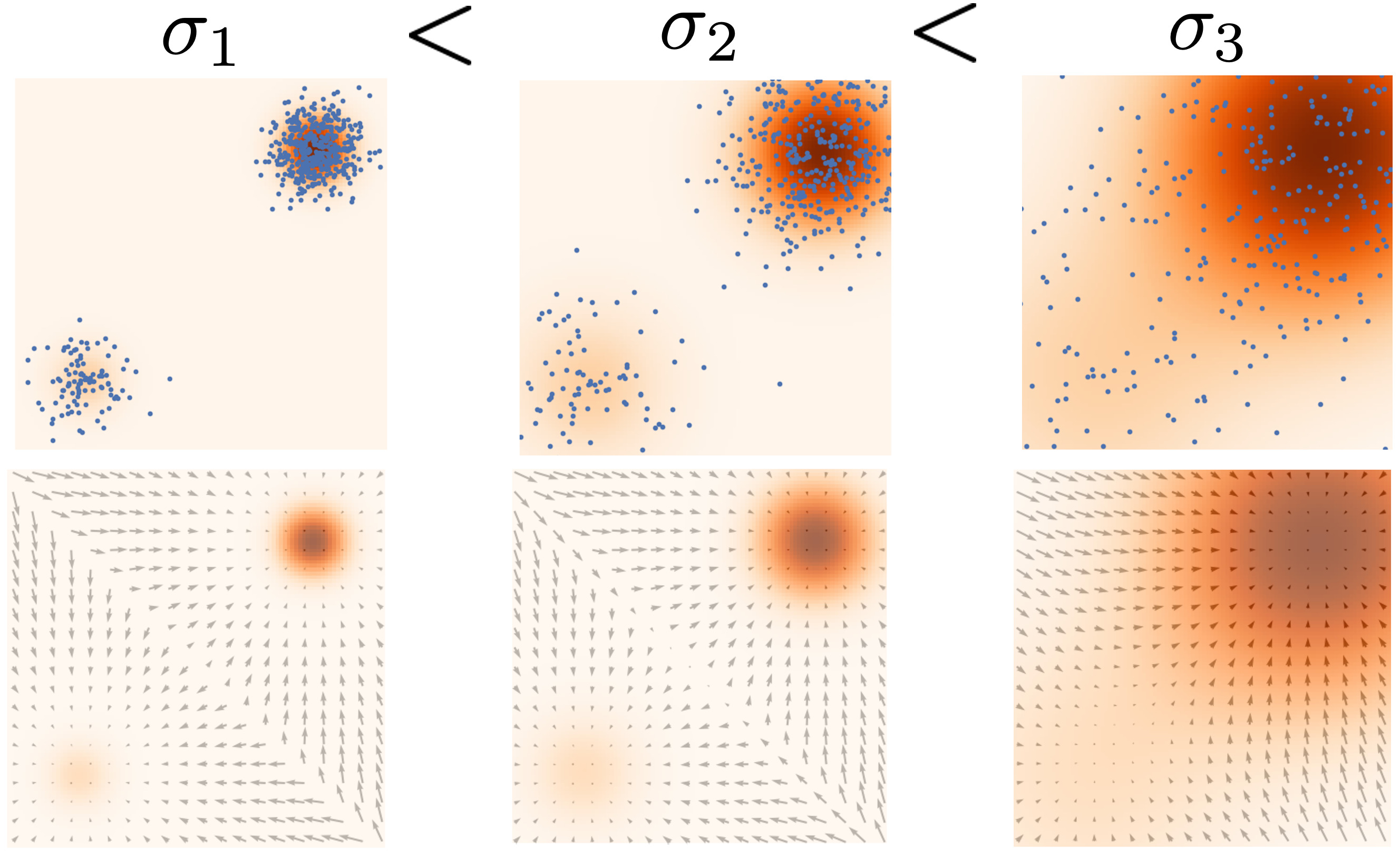
To achieve the best of both worlds, we use multiple scales of noise perturbations simultaneously
Note that we can easily draw samples from \(p_{\sigma_i}(\mathbf{x})\) by sampling \(\mathbf{x} \sim p(\mathbf{x})\) and computing \(\mathbf{x} + \sigma_i \mathbf{z}\), with \(\mathbf{z} \sim \mathcal{N}(0, I)\).
Next, we estimate the score function of each noise-perturbed distribution, \(\nabla_\mathbf{x} \log p_{\sigma_i}(\mathbf{x})\), by training a Noise Conditional Score-Based Model \(\mathbf{s}_\theta(\mathbf{x}, i)\) (also called a Noise Conditional Score Network, or NCSN

The training objective for \(\mathbf{s}_\theta(\mathbf{x}, i)\) is a weighted sum of Fisher divergences for all noise scales. In particular, we use the objective below:
\[\begin{equation} \sum_{i=1}^L \lambda(i) \mathbb{E}_{p_{\sigma_i}(\mathbf{x})}[\| \nabla_\mathbf{x} \log p_{\sigma_i}(\mathbf{x}) - \mathbf{s}_\theta(\mathbf{x}, i) \|_2^2],\label{ncsn_obj} \end{equation}\]where \(\lambda(i) \in \mathbb{R}_{>0}\) is a positive weighting function, often chosen to be \(\lambda(i) = \sigma_i^2\). The objective \eqref{ncsn_obj} can be optimized with score matching, exactly as in optimizing the naive (unconditional) score-based model \(\mathbf{s}_\theta(\mathbf{x})\).
After training our noise-conditional score-based model \(\mathbf{s}_\theta(\mathbf{x}, i)\), we can produce samples from it by running Langevin dynamics for \(i = L, L-1, \cdots, 1\) in sequence. This method is called annealed Langevin dynamics (defined by Algorithm 1 in
Here are some practical recommendations for tuning score-based generative models with multiple noise scales:
-
Choose \(\sigma_1 < \sigma_2 < \cdots < \sigma_L\) as a geometric progression, with \(\sigma_1\) being sufficiently small and \(\sigma_L\) comparable to the maximum pairwise distance between all training data points
. \(L\) is typically on the order of hundreds or thousands. -
Parameterize the score-based model \(\mathbf{s}_\theta(\mathbf{x}, i)\) with U-Net skip connections
. -
Apply exponential moving average on the weights of the score-based model when used at test time
.
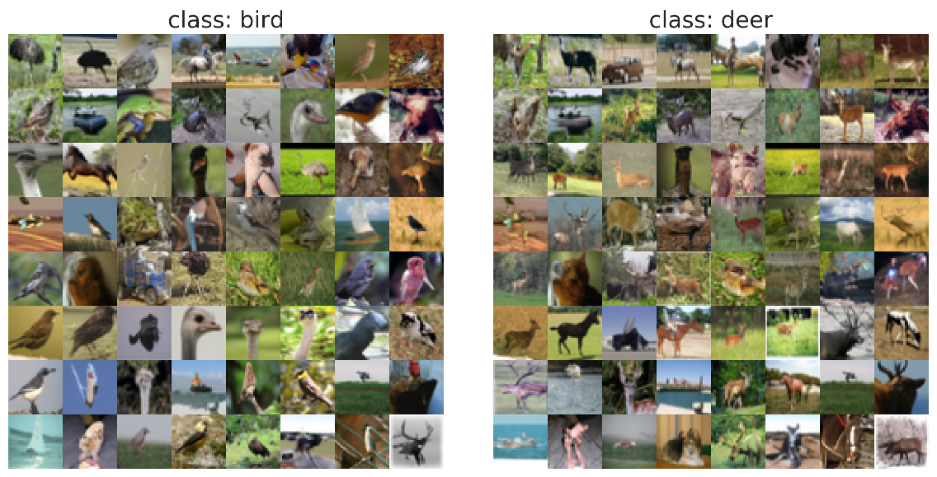
With such best practices, we are able to generate high quality image samples with comparable quality to GANs on various datasets, such as below:

Score-based generative modeling with stochastic differential equations (SDEs)
As we already discussed, adding multiple noise scales is critical to the success of score-based generative models. By generalizing the number of noise scales to infinity
In addition to this introduction, we have tutorials written in Google Colab to provide a step-by-step guide for training a toy model on MNIST. We also have more advanced code repositories that provide full-fledged implementations for large scale applications.
| Link | Description |
|---|---|
| Tutorial of score-based generative modeling with SDEs in JAX + FLAX | |
| Load our pretrained checkpoints and play with sampling, likelihood computation, and controllable synthesis (JAX + FLAX) | |
| Tutorial of score-based generative modeling with SDEs in PyTorch | |
| Load our pretrained checkpoints and play with sampling, likelihood computation, and controllable synthesis (PyTorch) | |
| Code in JAX | Score SDE codebase in JAX + FLAX |
| Code in PyTorch | Score SDE codebase in PyTorch |
Perturbing data with an SDE
When the number of noise scales approaches infinity, we essentially perturb the data distribution with continuously growing levels of noise. In this case, the noise perturbation procedure is a continuous-time stochastic process, as demonstrated below
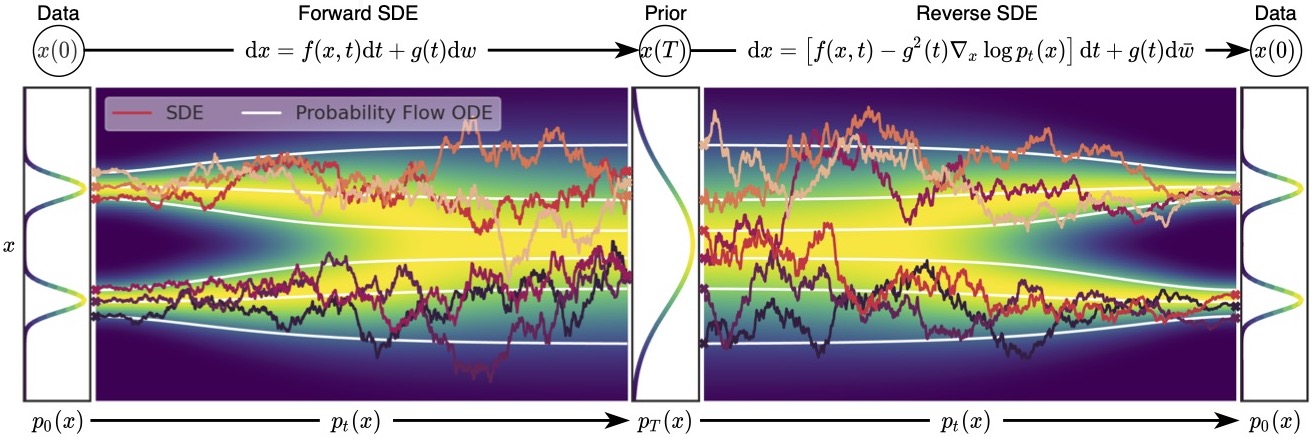
How can we represent a stochastic process in a concise way? Many stochastic processes (diffusion processes in particular) are solutions of stochastic differential equations (SDEs). In general, an SDE possesses the following form:
\[\begin{align} \mathrm{d}\mathbf{x} = \mathbf{f}(\mathbf{x}, t) \mathrm{d}t + g(t) \mathrm{d} \mathbf{w},\label{sde} \end{align}\]where \(\mathbf{f}(\cdot, t): \mathbb{R}^d \to \mathbb{R}^d\) is a vector-valued function called the drift coefficient, \(g(t)\in \mathbb{R}\) is a real-valued function called the diffusion coefficient, \(\mathbf{w}\) denotes a standard Brownian motion, and \(\mathrm{d} \mathbf{w}\) can be viewed as infinitesimal white noise. The solution of a stochastic differential equation is a continuous collection of random variables \(\{ \mathbf{x}(t) \}_{t\in [0, T]}\). These random variables trace stochastic trajectories as the time index \(t\) grows from the start time \(0\) to the end time \(T\). Let \(p_t(\mathbf{x})\) denote the (marginal) probability density function of \(\mathbf{x}(t)\). Here \(t \in [0, T]\) is analogous to \(i = 1, 2, \cdots, L\) when we had a finite number of noise scales, and \(p_t(\mathbf{x})\) is analogous to \(p_{\sigma_i}(\mathbf{x})\). Clearly, \(p_0(\mathbf{x}) = p(\mathbf{x})\) is the data distribution since no perturbation is applied to data at \(t=0\). After perturbing \(p(\mathbf{x})\) with the stochastic process for a sufficiently long time \(T\), \(p_T(\mathbf{x})\) becomes close to a tractable noise distribution \(\pi(\mathbf{x})\), called a prior distribution. We note that \(p_T(\mathbf{x})\) is analogous to \(p_{\sigma_L}(\mathbf{x})\) in the case of finite noise scales, which corresponds to applying the largest noise perturbation \(\sigma_L\) to the data.
The SDE in \eqref{sde} is hand designed, similarly to how we hand-designed \(\sigma_1 < \sigma_2 < \cdots < \sigma_L\) in the case of finite noise scales. There are numerous ways to add noise perturbations, and the choice of SDEs is not unique. For example, the following SDE
\[\begin{align} \mathrm{d}\mathbf{x} = e^{t} \mathrm{d} \mathbf{w} \end{align}\]perturbs data with a Gaussian noise of mean zero and exponentially growing variance, which is analogous to perturbing data with \(\mathcal{N}(0, \sigma_1^2 I), \mathcal{N}(0, \sigma_2^2 I), \cdots, \mathcal{N}(0, \sigma_L^2 I)\) when \(\sigma_1 < \sigma_2 < \cdots < \sigma_L\) is a geometric progression. Therefore, the SDE should be viewed as part of the model, much like \(\{\sigma_1, \sigma_2, \cdots, \sigma_L\}\). In
Reversing the SDE for sample generation
Recall that with a finite number of noise scales, we can generate samples by reversing the perturbation process with annealed Langevin dynamics, i.e., sequentially sampling from each noise-perturbed distribution using Langevin dynamics. For infinite noise scales, we can analogously reverse the perturbation process for sample generation by using the reverse SDE.
Importantly, any SDE has a corresponding reverse SDE
Here \(\mathrm{d} t\) represents a negative infinitesimal time step, since the SDE \eqref{rsde} needs to be solved backwards in time (from \(t=T\) to \(t = 0\)). In order to compute the reverse SDE, we need to estimate \(\nabla_\mathbf{x} \log p_t(\mathbf{x})\), which is exactly the score function of \(p_t(\mathbf{x})\).

Estimating the reverse SDE with score-based models and score matching
Solving the reverse SDE requires us to know the terminal distribution \(p_T(\mathbf{x})\), and the score function \(\nabla_\mathbf{x} \log p_t(\mathbf{x})\). By design, the former is close to the prior distribution \(\pi(\mathbf{x})\) which is fully tractable. In order to estimate \(\nabla_\mathbf{x} \log p_t(\mathbf{x})\), we train a Time-Dependent Score-Based Model \(\mathbf{s}_\theta(\mathbf{x}, t)\), such that \(\mathbf{s}_\theta(\mathbf{x}, t) \approx \nabla_\mathbf{x} \log p_t(\mathbf{x})\). This is analogous to the noise-conditional score-based model \(\mathbf{s}_\theta(\mathbf{x}, i)\) used for finite noise scales, trained such that \(\mathbf{s}_\theta(\mathbf{x}, i) \approx \nabla_\mathbf{x} \log p_{\sigma_i}(\mathbf{x})\).
Our training objective for \(\mathbf{s}_\theta(\mathbf{x}, t)\) is a continuous weighted combination of Fisher divergences, given by
\[\begin{equation} \mathbb{E}_{t \in \mathcal{U}(0, T)}\mathbb{E}_{p_t(\mathbf{x})}[\lambda(t) \| \nabla_\mathbf{x} \log p_t(\mathbf{x}) - \mathbf{s}_\theta(\mathbf{x}, t) \|_2^2], \end{equation}\]where \(\mathcal{U}(0, T)\) denotes a uniform distribution over the time interval \([0, T]\), and \(\lambda: \mathbb{R} \to \mathbb{R}_{>0}\) is a positive weighting function. Typically we use \(\lambda(t) \propto 1/ \mathbb{E}[\| \nabla_{\mathbf{x}(t)} \log p(\mathbf{x}(t) \mid \mathbf{x}(0))\|_2^2]\) to balance the magnitude of different score matching losses across time.
As before, our weighted combination of Fisher divergences can be efficiently optimized with score matching methods, such as denoising score matching
We can start with \(\mathbf{x}(T) \sim \pi\), and solve the above reverse SDE to obtain a sample \(\mathbf{x}(0)\). Let us denote the distribution of \(\mathbf{x}(0)\) obtained in such way as \(p_\theta\). When the score-based model \(\mathbf{s}_\theta(\mathbf{x}, t)\) is well-trained, we have \(p_\theta \approx p_0\), in which case \(\mathbf{x}(0)\) is an approximate sample from the data distribution \(p_0\).
When \(\lambda(t) = g^2(t)\), we have an important connection between our weighted combination of Fisher divergences and the KL divergence from \(p_0\) to \(p_\theta\) under some regularity conditions
Due to this special connection to the KL divergence and the equivalence between minimizing KL divergences and maximizing likelihood for model training, we call \(\lambda(t) = g(t)^2\) the likelihood weighting function. Using this likelihood weighting function, we can train score-based generative models to achieve very high likelihoods, comparable or even superior to state-of-the-art autoregressive models
How to solve the reverse SDE
By solving the estimated reverse SDE with numerical SDE solvers, we can simulate the reverse stochastic process for sample generation. Perhaps the simplest numerical SDE solver is the Euler-Maruyama method. When applied to our estimated reverse SDE, it discretizes the SDE using finite time steps and small Gaussian noise. Specifically, it chooses a small negative time step \(\Delta t \approx 0\), initializes \(t \gets T\), and iterates the following procedure until \(t \approx 0\):
\[\begin{aligned} \Delta \mathbf{x} &\gets [\mathbf{f}(\mathbf{x}, t) - g^2(t) \mathbf{s}_\theta(\mathbf{x}, t)]\Delta t + g(t) \sqrt{\vert \Delta t\vert }\mathbf{z}_t \\ \mathbf{x} &\gets \mathbf{x} + \Delta \mathbf{x}\\ t &\gets t + \Delta t, \end{aligned}\]Here \(\mathbf{z}_t \sim \mathcal{N}(0, I)\). The Euler-Maruyama method is qualitatively similar to Langevin dynamics—both update \(\mathbf{x}\) by following score functions perturbed with Gaussian noise.
Aside from the Euler-Maruyama method, other numerical SDE solvers can be directly employed to solve the reverse SDE for sample generation, including, for example, Milstein method, and stochastic Runge-Kutta methods. In
In addition, there are two special properties of our reverse SDE that allow for even more flexible sampling methods:
- We have an estimate of \(\nabla_\mathbf{x} \log p_t(\mathbf{x})\) via our time-dependent score-based model \(\mathbf{s}_\theta(\mathbf{x}, t)\).
- We only care about sampling from each marginal distribution \(p_t(\mathbf{x})\). Samples obtained at different time steps can have arbitrary correlations and do not have to form a particular trajectory sampled from the reverse SDE.
As a consequence of these two properties, we can apply MCMC approaches to fine-tune the trajectories obtained from numerical SDE solvers. Specifically, we propose Predictor-Corrector samplers. The predictor can be any numerical SDE solver that predicts \(\mathbf{x}(t + \Delta t) \sim p_{t+\Delta t}(\mathbf{x})\) from an existing sample \(\mathbf{x}(t) \sim p_t(\mathbf{x})\). The corrector can be any MCMC procedure that solely relies on the score function, such as Langevin dynamics and Hamiltonian Monte Carlo.
At each step of the Predictor-Corrector sampler, we first use the predictor to choose a proper step size \(\Delta t < 0\), and then predict \(\mathbf{x}(t + \Delta t)\) based on the current sample \(\mathbf{x}(t)\). Next, we run several corrector steps to improve the sample \(\mathbf{x}(t + \Delta t)\) according to our score-based model \(\mathbf{s}_\theta(\mathbf{x}, t + \Delta t)\), so that \(\mathbf{x}(t + \Delta t)\) becomes a higher-quality sample from \(p_{t+\Delta t}(\mathbf{x})\).
With Predictor-Corrector methods and better architectures of score-based models, we can achieve state-of-the-art sample quality on CIFAR-10 (measured in FID
| Method | FID \(\downarrow\) | Inception score \(\uparrow\) |
|---|---|---|
| StyleGAN2 + ADA | 2.92 | 9.83 |
| Ours | 2.20 | 9.89 |
The sampling methods are also scalable for extremely high dimensional data. For example, it can successfully generate high fidelity images of resolution \(1024\times 1024\).

Some additional (uncurated) samples for other datasets (taken from this GitHub repo):


Probability flow ODE
Despite capable of generating high-quality samples, samplers based on Langevin MCMC and SDE solvers do not provide a way to compute the exact log-likelihood of score-based generative models. Below, we introduce a sampler based on ordinary differential equations (ODEs) that allow for exact likelihood computation.
In
The following figure depicts trajectories of both SDEs and probability flow ODEs. Although ODE trajectories are noticeably smoother than SDE trajectories, they convert the same data distribution to the same prior distribution and vice versa, sharing the same set of marginal distributions \(\{ p_t(\mathbf{x}) \}_{t \in [0, T]}\). In other words, trajectories obtained by solving the probability flow ODE have the same marginal distributions as the SDE trajectories.
This probability flow ODE formulation has several unique advantages.
When \(\nabla_\mathbf{x} \log p_t(\mathbf{x})\) is replaced by its approximation \(\mathbf{s}_\theta(\mathbf{x}, t)\), the probability flow ODE becomes a special case of a neural ODE
As such, the probability flow ODE inherits all properties of neural ODEs or continuous normalizing flows, including exact log-likelihood computation. Specifically, we can leverage the instantaneous change-of-variable formula (Theorem 1 in
In fact, our model achieves the state-of-the-art log-likelihoods on uniformly dequantized
| Method | Negative log-likelihood (bits/dim) \(\downarrow\) |
|---|---|
| RealNVP | 3.49 |
| iResNet | 3.45 |
| Glow | 3.35 |
| FFJORD | 3.40 |
| Flow++ | 3.29 |
| Ours | 2.99 |
When training score-based models with the likelihood weighting we discussed before, and using variational dequantization to obtain likelihoods on discrete images, we can achieve comparable or even superior likelihood to the state-of-the-art autoregressive models (all without any data augmentation)
| Method | Negative log-likelihood (bits/dim) \(\downarrow\) on CIFAR-10 | Negative log-likelihood (bits/dim) \(\downarrow\) on ImageNet 32x32 |
|---|---|---|
| Sparse Transformer | 2.80 | - |
| Image Transformer | 2.90 | 3.77 |
| Ours | 2.83 | 3.76 |
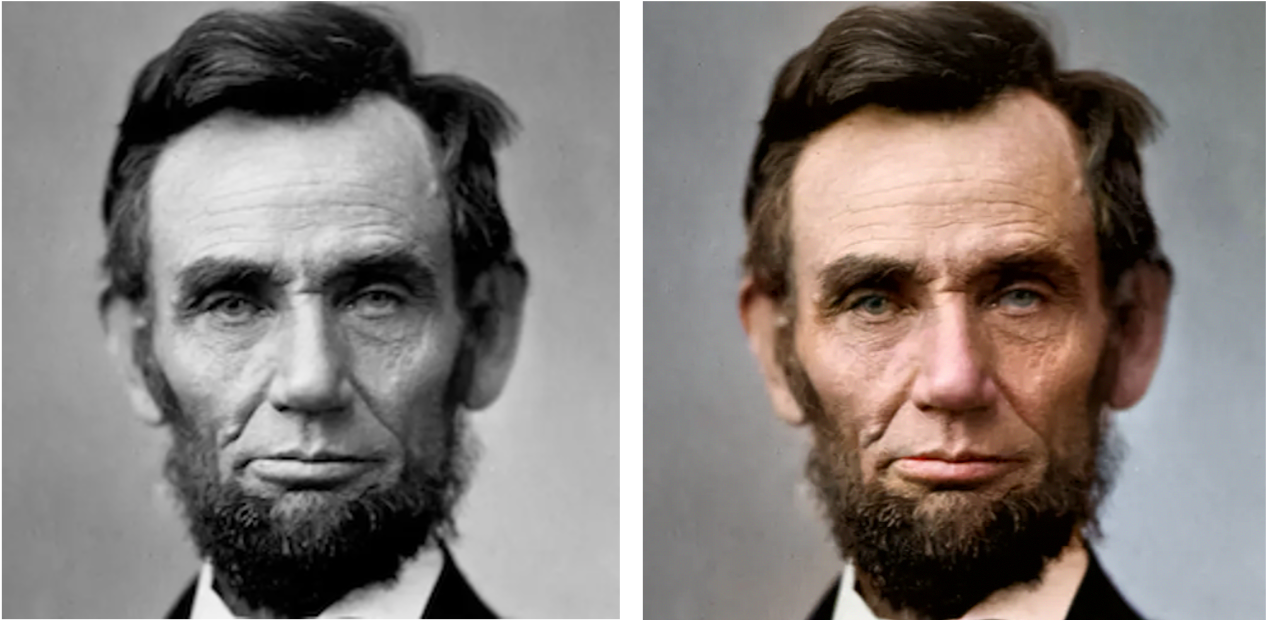
Controllable generation for inverse problem solving
Score-based generative models are particularly suitable for solving inverse problems. At its core, inverse problems are same as Bayesian inference problems. Let \(\mathbf{x}\) and \(\mathbf{y}\) be two random variables, and suppose we know the forward process of generating \(\mathbf{y}\) from \(\mathbf{x}\), represented by the transition probability distribution \(p(\mathbf{y} \mid \mathbf{x})\). The inverse problem is to compute \(p(\mathbf{x} \mid \mathbf{y})\). From Bayes’ rule, we have \(p(\mathbf{x} \mid \mathbf{y}) = p(\mathbf{x}) p(\mathbf{y} \mid \mathbf{x}) / \int p(\mathbf{x}) p(\mathbf{y} \mid \mathbf{x}) \mathrm{d} \mathbf{x}\). This expression can be greatly simplified by taking gradients with respect to \(\mathbf{x}\) on both sides, leading to the following Bayes’ rule for score functions:
\[\begin{equation} \nabla_\mathbf{x} \log p(\mathbf{x} \mid \mathbf{y}) = \nabla_\mathbf{x} \log p(\mathbf{x}) + \nabla_\mathbf{x} \log p(\mathbf{y} \mid \mathbf{x}).\label{inverse_problem} \end{equation}\]Through score matching, we can train a model to estimate the score function of the unconditional data distribution, i.e., \(\mathbf{s}_\theta(\mathbf{x}) \approx \nabla_\mathbf{x} \log p(\mathbf{x})\). This will allow us to easily compute the posterior score function \(\nabla_\mathbf{x} \log p(\mathbf{x} \mid \mathbf{y})\) from the known forward process \(p(\mathbf{y} \mid \mathbf{x})\) via equation \eqref{inverse_problem}, and sample from it with Langevin-type sampling
A recent work from UT Austin
Below we show some examples on solving inverse problems for computer vision.


Connection to diffusion models and others
I started working on score-based generative modeling since 2019, when I was trying hard to make score matching scalable for training deep energy-based models on high-dimensional datasets. My first attempt at this led to the method sliced score matching
The idea of perturbing data with multiple scales of noise is by no means unique to score-based generative models though. It has been previously used in, for example, simulated annealing, annealed importance sampling
In 2020, Jonathan Ho and colleagues
Inspired by their work, we further investigated the relationship between diffusion models and score-based generative models in an ICLR 2021 paper
Collectively, these latest developments seem to indicate that both score-based generative modeling with multiple noise perturbations and diffusion probabilistic models are different perspectives of the same model family, much like how wave mechanics and matrix mechanics are equivalent formulations of quantum mechanics in the history of physics
Many recent works on score-based generative models or diffusion probabilistic models have been deeply influenced by knowledge from both sides of research (see a website curated by researchers at the University of Oxford). Despite this deep connection between score-based generative models and diffusion models, it is hard to come up with an umbrella term for the model family that they both belong to. Some colleagues in DeepMind propose to call them “Generative Diffusion Processes”. It remains to be seen if this will be adopted by the community in the future.
Concluding remarks
This blog post gives a detailed introduction to score-based generative models. We demonstrate that this new paradigm of generative modeling is able to produce high quality samples, compute exact log-likelihoods, and perform controllable generation for inverse problem solving. It is a compilation of several papers we published in the past few years. Please visit them if you are interested in more details:
For a list of works that have been influenced by score-based generative modeling, researchers at the University of Oxford have built a very useful (but necessarily incomplete) website: https://scorebasedgenerativemodeling.github.io/.
There are two major challenges of score-based generative models. First, the sampling speed is slow since it involves a large number of Langevin-type iterations. Second, it is inconvenient to work with discrete data distributions since scores are only defined on continuous distributions.
The first challenge can be partially solved by using numerical ODE solvers for the probability flow ODE with lower precision (a similar method, denoising diffusion implicit modeling, has been proposed in
The second challenge can be addressed by learning an autoencoder on discrete data and performing score-based generative modeling on its continuous latent space
It is my conviction that these challenges will soon be solved with the joint efforts of the research community, and score-based generative models/ diffusion-based models will become one of the most useful tools for data generation, density estimation, inverse problem solving, and many other downstream tasks in machine learning.